QAF2D: Nullmax Earns CVPR 2024 Recognition for Innovative 3D Object Detection
Date: 2024-02-27Recently, the Nullmax Perception Team's research paper, "Enhancing 3D Object Detection with 2D Detection-Guided Query Anchors," was accepted at CVPR 2024. This prestigious recognition affirms Nullmax's innovative scientific research in the field of autonomous driving.
CVPR, the IEEE Conference on Computer Vision and Pattern Recognition, is a premier event in the computer vision and pattern recognition community, renowned for its rigorous standards and global influence.
In this paper, Nullmax's team introduced the QAF2D (Query Anchor From 2D) method. This innovative approach significantly enhances multi-camera 3D object detection by leveraging 2D detection results to guide the generation of 3D query anchors. Additionally, Nullmax has developed a two-stage optimization method using visual prompts. This approach allows the 2D and 3D detectors to share the same image feature extraction backbone, reducing resource consumption for model training and deployment without compromising the performance of the 3D detector.
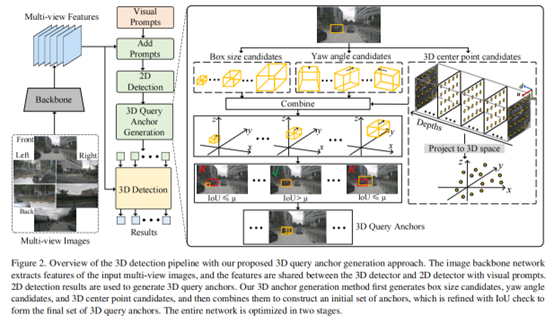
Nullmax has integrated the QAF2D method into three commonly used query-based 3D object detectors on the nuScenes dataset. The experimental results indicate that QAF2D achieved notable performance improvements, with an average increase of 1.18% in NDS and 1.74% in mAP, and maximum gains of 2.3% in NDS and 2.7% in mAP.
In the industry of autonomous driving, 3D object detection is crucial for tasks such as obstacle detection. Enhanced 3D object detection performance can significantly boost the overall effectiveness of autonomous driving systems, particularly in terms of safety. Applying QAF2D to mass-produced vehicles can further improve the performance of automated driving while reducing hardware resource requirements during development and deployment.
As a leading automated driving company, Nullmax boasts a strong R&D team. Looking ahead, the company will continue to explore 3D object detection, continuously improving the performance and robustness of perception systems. By applying our research findings to real-world scenarios, we are committed to advancing the implementation of autonomous driving technology.
Media Relations
media@nullmax.aiRelated Articles
- Nullmax and Renesas Forge Strategic Partnership to Deliver Competitive ADAS Solutions for the Global Market 2025-02-25
- Nullmax's Vision-Only Tech: Eyes for Autonomous Driving and Robotics to Explore the World 2024-09-03
- Nullmax Launches 'Nullmax Intelligence': End-to-End Autonomous Driving Technology 2024-07-16
- Explore Autonomous Driving with MLF: More Efficient and Easier to Scale-Up 2024-06-03
- Nullmax Introduces New Vision Technologies to Boost Self-Driving Performance, Delivering Exceptional Mobility Experience 2024-05-14